ROBÓTICA
1. PROTOBOARD
Es una placa que posee unos orificios conectados eléctricamente entre sí siguiendo un patrón horizontal o vertical. Es empleada para realizar pruebas de circuitos electrónicos, insertando en ella componentes electrónicos y cables como puente.

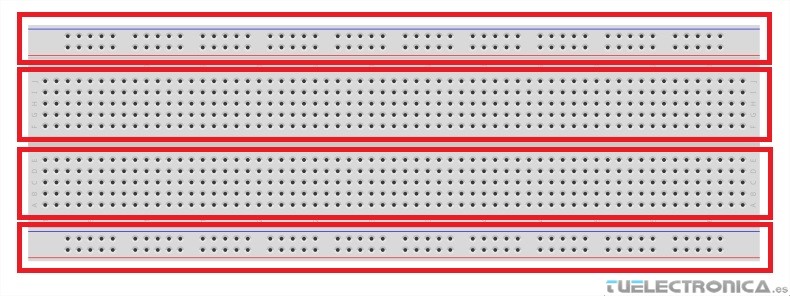
Existen muchos modelos de placas protoboards, se pueden diferenciar principalmente por la cantidad de orificios que poseen, pero por lo general en todos los tipos de placas de pruebas podemos diferenciar tres partes:
- En uno de los extremos o en los dos, podemos tener la zona de alimentación.
- Para conectar los componentes entre si se emplea la zona de conexiones superior o zona de conexión inferior.
Zona de alimentación
La zona de alimentación está compuesta por orificios horizontales conectados entre sí eléctricamente a lo largo de toda la placa. Son dos líneas independientes; una para alimentación y otra para masa.
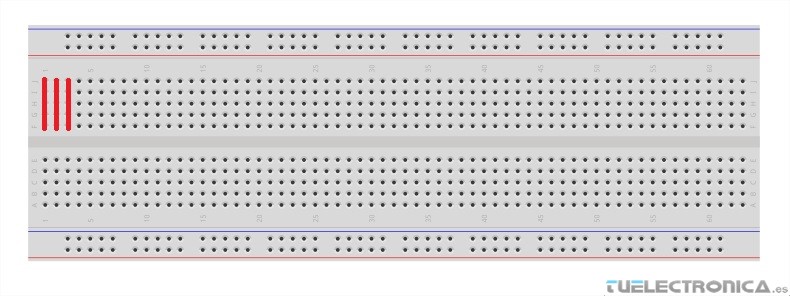
Zona de conexiones superior
La zona de conexiones superior está compuesta por columnas de orificios conectados eléctricamente entre sí. Cada columna es independiente eléctricamente con las demás.
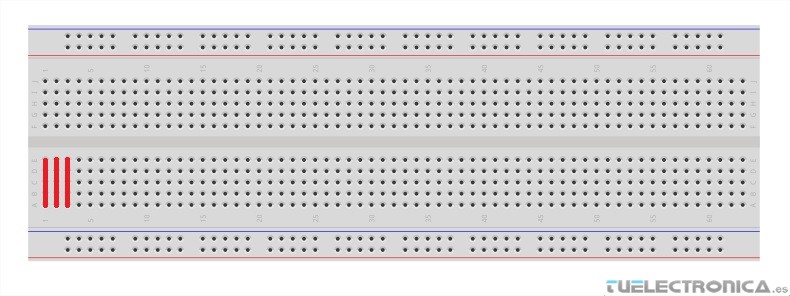
Zona de conexiones inferior
La zona de conexiones inferior es igual a la zona de conexiones superiores. Ambas zonas están separadas eléctricamente. Estas dos zonas son muy necesarias para la inserción de circuitos integrados con dos filas de pines.
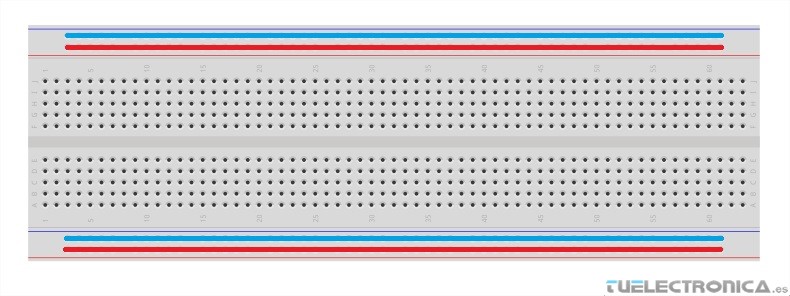
Los protoboard son pequeñas tablas con perforaciones en toda su área, en las cuales se colocan diversos componentes electrónicos, se distinguen por tener filas y columnas con lo que se puede saber en que ubicación posicionar cada pieza, también cuentan con 2 rieles a los lados, los cuales se usarán como las lineas Positivas y Negativas de nuestro circuito.
La línea azul siempre Sera negativo, también llamada: tierraPor otro lado, la línea roja siempre será positivo, también llamado corriente (por algunos)
2. CLASES DE MOTORES
MOTORES DE CORRIENTE CONTINUA
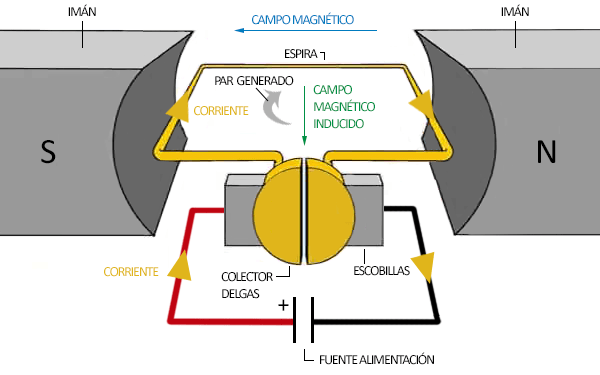
Los motores de corriente continua (motores DC) son unos de los actuadores más comunes. Su funcionamiento se basa en el alineamiento de dos campos magnéticos.
El estator, la parte fija del motor, dispone de un imán permanente que genera un campo magnético en el interior del motor.
En su interior introducimos una espira y hacemos circular una corriente eléctrica, con lo que se genera un campo magnético. El desfase angular entre ambos campos magnéticos genera un par de giro, que hace que el rotor gire hasta que los dos campos magnéticos se alineen.
Cuando ambos campos magnéticos estuvieran alineados el motor se pararía. Para que el motor gire continuamente vamos a invertir uno de los campos magnéticos, para lo cuál necesitamos invertir el sentido de la corriente que atraviesa la espira.
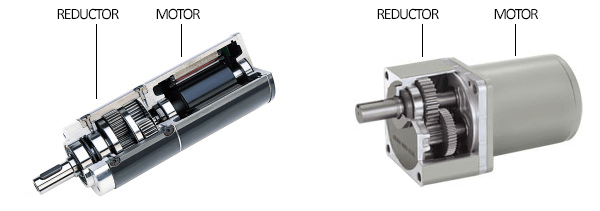
MOTORES GEARED DOWN MOTOR
Un motor geared down es un motor de corriente continua que incorpora un reductor interno. Esto aumenta el par del motor y reduce su velocidad. Velocidades de giro habituales son 60, 120, 240 y 480 rpm, entre otras.
Es frecuente que strong>algunos motores geared down incorporan un encoder interno. Este encoder suele estar aplicado en el lado de alta velocidad, por lo que la precisión es superior a añadir una encoder acoplado al eje.
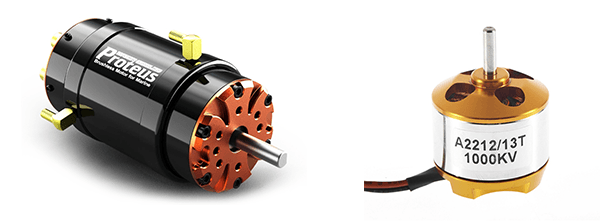
MOTORES BRUSHLESS
Los motores brushless (sin escobillas) son otra variación de los motores de corriente continua que prescinde de las escobillas como sistema de rectificación de la corriente. En su lugar recurren a la electrónica para realizar la conmutación del campo magnético. Al no disponer de escobillas los motores brushless tienen mayores velocidades, menor peso, y mayor durabilidad que los motores DC tradicionales.
SERVO MOTORES
Los servos son otro actuador muy común en proyectos de robótica. Un servo recibe una señal pulsada generada por un procesador, que transmite la posición que deseamos y el servo autónomamente se posiciona en esa posición. Un servo no puede dar una vuelta completa, siendo su rango habitual de 180º. A cambio, proporcionan un control total en posición y giro y de una alta precisión, y son muy sencillos de usar. Los servos son ampliamente utilizados en proyectos de robótica, como brazos robóticos, hexápodos, o robots bípedos. También pueden usarse en torretas, o para posicionar un sensor, o un láser.

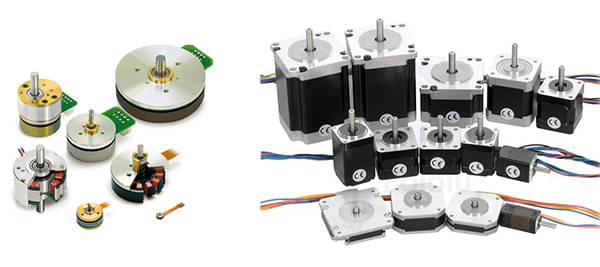
MOTORES PASO A PASO
Los motores paso a paso (también llamados stepper) son otro tipo de motor muy empleado en robótica. En este tipo de motores el eje gira un ángulo fijo llamado "paso" cuando es indicado por un procesador. El paso varía del modelo de motor, siendo valores habituales 1.8º (200 pasos por vuelta) y 3.75º (96 pasos por vuelta).
A rasgos generales, un motor paso a paso está formado por un estator con dos bobinas desfasadas a 90º y un rotor formado por un imán permanente instalado solidariamente al eje.
Aplicando una secuencia de encendido adecuada a las bobinas podemos hacer que el imán se oriente progresivamente, hasta dar un giro completo. Si la secuencia es incorrecta el motor no se moverá. Por este motivo, un motor paso a paso necesita obligatoriamente un procesador para funcionar no siendo posible activarlos simplemente conectandolos a corriente.
3. TIPOS DE BATERÍAS
BATERÍAS DE PLOMO-ÁCIDO
Las baterías plomo-ácido, como las que se utilizan en los autos, poseen seis celdas con un voltaje nominal de 2,1 V cada una. Cuando están cargadas, las celdas están formadas por electrodos de plomo metálico (Pb) y óxido de plomo (PbO2) sumergidos en un electrolito de alrededor de 37 % de ácido sulfúrico (H2SO4) disuelto en agua.

BATERÍAS DE GEL
Una batería de gel es una batería de plomo-ácido con un electrolito gelificado. Las celdas de una batería de gel están selladas, lo que hace que la batería no tenga problemas con su orientación física, como pasa con las baterías normales de plomo-ácido, que deben colocarse en una única posición para que no se vuelque el líquido del electrolito.

BATERÍAS DE NÍQUEL-CADMIO (Ni-Cd)
Una batería recargable de Ni-CD (o NiCd) está formada por una placa positiva de hidróxido de níquel y una placa negativa de hidróxido de cadmio. Ambas placas están separadas por un electrolito, compuesto por una solución acuosa de potasio cáustico, contenida dentro de un tejido poroso.
La tensión de una batería medida en voltios (V), sin circulación de corriente, es diferente a la que se obtiene cuando ésta es sometida a un consumo, es decir, cuando se toma la medición en una situación de trabajo. Para el caso de un elemento recargable de Ni-Cd la tensión entre los bornes sin carga conectada tiene un valor de alrededor de 1,45 V. Pero con una carga que consume energía esta tensión disminuye a un valor de aproximadamente 1,25 V.

BATERÍAS DE NÍQUEL E HIDRURO METÁLICO (Ni/MH)
Una batería de níquel e hidruro metálico (o Ni/MH) es un tipo de batería recargable similar a una de níquel-cadmio (Ni-Cd) pero que no contiene cadmio, un metal caro y dañino para el medioambiente.
Las baterías de níquel e hidruro metálico tienden a tener una mayor capacidad que las Ni-Cd y sufren bastante menos el efecto memoria.
Las baterías de níquel e hidruro metálico son más amigables con el medio ambiente. Pueden almacenar un 30% más de energía que una de Ni-Cd equivalente, y por tanto, la carga dura más tiempo. Resultan prácticas cuando se realizan pruebas porque sus electrodos se pueden soldar sin problemas.

BATERÍAS DE IONES DE LITIO (Li-Ion)
Las baterías Li-Ion poseen una elevada densidad de energía, acumulando un carga mayor por unidad de volumen. Por esta razón tienen menor peso en relación a baterías de otro tipo de la misma capacidad. Se presentan en placas rectangulares, de poco espesor, de menos de 0,5 cm, los que las hace especialmente interesantes para integrarlas en dispositivos portátiles con poco espacio.
Presentan un alto voltaje por celda; cada unidad proporciona 3,6 voltios, lo mismo que tres celdas de Ni-Cd (1,2 V cada una). Carecen de efecto memoria. Su descarga es lineal, es decir, que durante toda la descarga el voltaje de la batería apenas varía, lo que evita la necesidad de circuitos reguladores. (Se debe tener en cuenta que esto puede ser una desventaja en algunos casos, ya que hace difícil averiguar el estado de carga de la batería.) Tienen una baja tasa de autodescarga.
Cuando guardamos una batería, ésta se descarga progresivamente aunque no se la use.

4. CABLES JUMPER
Un jumper o saltador es un elemento que permite cerrar el circuito eléctrico del que forma parte dos conexiones. La función del cable macho-macho es con frecuencia usado en el tablero protoboard haciendo posible la conexión de dos elementos ingresados en dicho tablero.

Es un tipo de socket rectangular de plástico que a su vez tiene en su interior dos o más sockets metálicos con un espacio entre ellos de 0.2 mm hechos de fósforo-bronce, de una aleación de cobre-níquel, de estaño o de latón y con un color dorado o cromado, de tal manera que cuando se introducen y se empujan hacia los pines de un circuito, éstos cierran el circuito cubriendo completamente los pines, resultando en una conexión temporal.
5. RESISTENCIAS
La resistencia eléctrica es la oposición (dificultad) al paso de la corriente eléctrica. Sabemos que la corriente eléctrica es el paso (movimiento) de electrones por un circuito o, a través de un elemento de un circuito (receptor). Según lo dicho podemos concluir que "la corriente eléctrica es un movimiento de electrones".
Dependiendo del tipo, material y sección (grosor) de cable o conductor por el que tengan que pasar los electrones, les costará más o menos trabajo. Un buen conductor casi no les ofrecerá resistencia a su paso por él, un aislante les ofrecerá tanta resistencia que los electrones no podrán pasar a través de él. Ese esfuerzo que tienen que vencer los electrones para circular, es precisamente la Resistencia Eléctrica. Luego lo veremos más detalladamente.

6. BOMBILLOS LED
Consiste básicamente en un material semiconductor que es capaz de emitir una radiación electromagnética en forma de Luz.
Su funcionamiento está basado en el efecto de la Electro-Luminiscencia, en la cual mediante una estimulación directa de polarización permite a este dispositivo liberar energía en forma de un Fotón, cuyo color está determinado por la banda de energía que haya sido estimulada.

Comentarios
Publicar un comentario